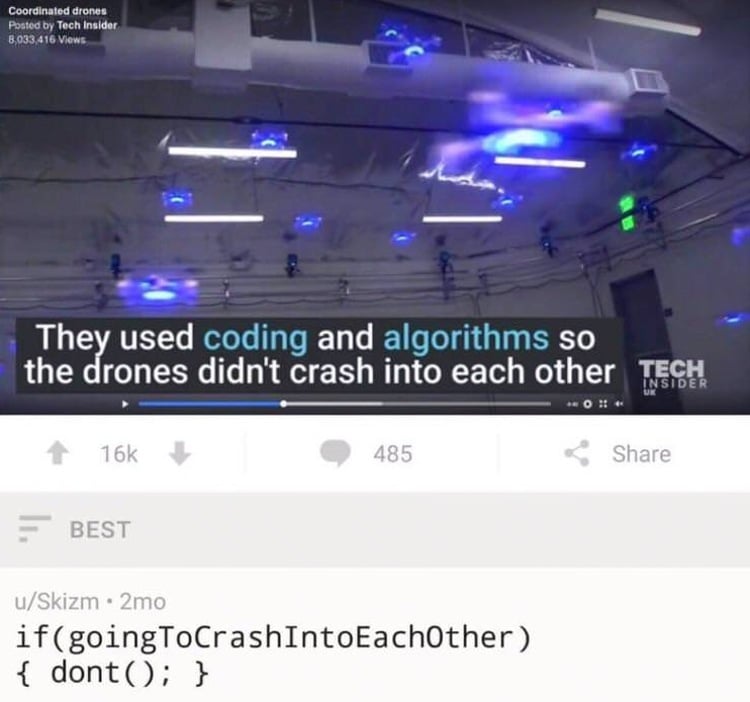
Well, even at that level of abstraction, it’s a bit weird, because goingToCrashIntoEachOther and dont() both need the information from where a collision is going to take place, so you’d expect something to be passed into dont().
Well, and it’s easy to dismiss this stuff as implementation details, but that if-statement needs to run as part of a loop. This loop should probably be on a separate thread, so it doesn’t get blocked by other stuff going on. Which means access to the motors needs to be behind some form of mutex, which it needs to be able to acquire fairly quickly. And then, yeah, those implementation details quickly add up to become the part that’s actually complex.
Couldn’t dont() just be an order to halt and goingToCrashIntoEachOther can be a simple true/false?
So the drones both stop, then start moving and immediately see they will crash into each other so they halt again. Drone version of you go, no no you go
In my head, the drones were going so fast that just slamming into the brakes wasn’t enough and you’d rather have to dodge. Not sure, if that’s only in my head or if I actually saw the video of these drones a long time ago.
But yeah, if they are going really slow, then that could work.
Maybe you’d even have them back up a bit and then turn at a random angle before trying to continue flying, so you don’t end up in the deadlock you described. 🙃
The functions just store all variables in a globally accessible JSON file. Compartmentalization is for programmers that aren’t capable of writing bug-free code.
While writing the comment above, I was thinking that there are some uncivilized languages that allow you to call functions in the same class without an explicit self.dont() or this.dont(), so technically you can magically transfer data like that.
But having a variable goingToCrashIntoEachOther in a class would be a bit weird.
The only logical way to coordinate multiple drones like this is to store the json on a local nas and have them take turns updating their vectors within
I was thinking the drones would use Bluetooth to send the modified json to each other which negates the need for a NAS.
Of course, two different drones may have modified the json nearly simultaneously so the json would need to be timestamped and the earlier timestamp overrules the later one in case of merge conflicts.


{kind=link}
Well, even at that level of abstraction, it’s a bit weird, because
goingToCrashIntoEachOtheranddont()both need the information from where a collision is going to take place, so you’d expect something to be passed intodont().Well, and it’s easy to dismiss this stuff as implementation details, but that if-statement needs to run as part of a loop. This loop should probably be on a separate thread, so it doesn’t get blocked by other stuff going on. Which means access to the motors needs to be behind some form of mutex, which it needs to be able to acquire fairly quickly. And then, yeah, those implementation details quickly add up to become the part that’s actually complex.
Couldn’t dont() just be an order to halt and goingToCrashIntoEachOther can be a simple true/false?
So the drones both stop, then start moving and immediately see they will crash into each other so they halt again. Drone version of you go, no no you go
In my head, the drones were going so fast that just slamming into the brakes wasn’t enough and you’d rather have to dodge. Not sure, if that’s only in my head or if I actually saw the video of these drones a long time ago.
But yeah, if they are going really slow, then that could work.
Maybe you’d even have them back up a bit and then turn at a random angle before trying to continue flying, so you don’t end up in the deadlock you described. 🙃
The functions just store all variables in a globally accessible JSON file. Compartmentalization is for programmers that aren’t capable of writing bug-free code.
While writing the comment above, I was thinking that there are some
uncivilizedlanguages that allow you to call functions in the same class without an explicitself.dont()orthis.dont(), so technically you can magically transfer data like that.But having a variable
goingToCrashIntoEachOtherin a class would be a bit weird.The only logical way to coordinate multiple drones like this is to store the json on a local nas and have them take turns updating their vectors within
I was thinking the drones would use Bluetooth to send the modified json to each other which negates the need for a NAS.
Of course, two different drones may have modified the json nearly simultaneously so the json would need to be timestamped and the earlier timestamp overrules the later one in case of merge conflicts.